빨간색 화살표로 표시된 폴로이드(,  ) 방향과 파란색 화살표로 표시된 또는
) 방향과 파란색 화살표로 표시된 또는
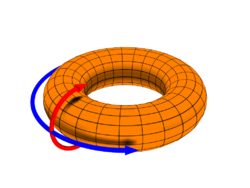
 방향을 나타내는 다이어그램.
방향을 나타내는 다이어그램. toroidal과 poloidal이라는 용어는 참조의 torus와 관련된 방향을 가리킨다.폴로이드 방향은 표면을 둘러싼 작은 원형 고리를 따르고, 토로이드 방향은 토러스 둘레에 커다란 원형 고리를 따라 중앙 보이드를 포위한다.
옥스퍼드 영어사전(OED)에서 인용한 이 용어들의 가장 초기 용어는 월터 M에 의해서이다. 엘사서(1946)는 중심부의 전류에 의해 지구 자기장이 생성되는 맥락에서, '토로이드'는 위도 선과 평행하고 '폴로이드'는 자기장 방향(즉 극을 향해)에 있다.
또한 OED는 자기억제 융접에서 마주친 바와 같이 이러한 용어들의 나중에 토로이드 구속 플라스마의 맥락에서 이 용어들의 사용을 기록한다.플라즈마 맥락에서 토로이드 방향은 토러스 둘레의 먼 길이며, 슬래브 근사치에서 z로 표시되거나 자기좌표에서 또는 폴로이드 방향은 토러스 둘레의 짧은 길이며, 해당 좌표는 토러스 둘레를 나타낸다.d 슬래브 근사치에서 y가 표시되거나 자기 좌표에서 이(가) 표시된다.(자석 표면에 정상인 세 번째 방향은 흔히 "방사 방향"이라고 불리며, 슬래브 근사치에서 x로 표시되며, 다양한 
 χ
χ  \rho} 또는 s로 표시된다.)
\rho} 또는 s로 표시된다.)
예
자석 구속 플라스마 물리학의 간단한 예로서, r{\의 원형 동심 자속 표면이 있는 축대칭 시스템을 고려한다( 초기 토카막의 자기장 기하학에 대한 조잡한 근사치지만 내포된 f를 가진 모든 토로이드 자기장 구속 시스템과 토폴로지적으로 동등하다).럭스 표면) surfaces 폴로이드 각도는 {\로 표시한다 그러면 Toroidal/Poloidal 좌표계는 다음과 같은 변환 규칙에 의한 표준 데카르트 좌표와 관련된다.
초기 토카막의 자기장 기하학에 대한 조잡한 근사치지만 내포된 f를 가진 모든 토로이드 자기장 구속 시스템과 토폴로지적으로 동등하다).럭스 표면) surfaces 폴로이드 각도는 {\로 표시한다 그러면 Toroidal/Poloidal 좌표계는 다음과 같은 변환 규칙에 의한 표준 데카르트 좌표와 관련된다.



여기서 =± , = ± 1 1
자연 선택은 기하학적으로 = =+ 를 택하여 위 그림의 화살표로 나타낸 토로이드 및 폴로이드 방향을 제시하지만, 이것은
위 그림의 화살표로 나타낸 토로이드 및 폴로이드 방향을 제시하지만, 이것은  θ, , ζ,ζ, ζ, \,,\, \, \, \, \, \,\그것이 집합 r, θ,ζ{\displaystyle r,\theta ,\zeta}은 오른손 좌표계,∇ r⋅ ∇ θ × ∇ ζ>0{\displaystyle \nablar\cdot \nabla \theta \times;0\zeta 을 \nabla}이 전자기적으로 비좁은 플라스마 양쪽을 설명하는데 자속 좌표를 설정할 때 가정한다, 우리는 자극에 의한 자기장의 directi을 뒤집어야 한다.에 의해taking
θ, , ζ,ζ, ζ, \,,\, \, \, \, \, \,\그것이 집합 r, θ,ζ{\displaystyle r,\theta ,\zeta}은 오른손 좌표계,∇ r⋅ ∇ θ × ∇ ζ>0{\displaystyle \nablar\cdot \nabla \theta \times;0\zeta 을 \nabla}이 전자기적으로 비좁은 플라스마 양쪽을 설명하는데 자속 좌표를 설정할 때 가정한다, 우리는 자극에 의한 자기장의 directi을 뒤집어야 한다.에 의해taking  , or reverse the toroidal direction by taking
, or reverse the toroidal direction by taking  . Both choices are used in the literature.
. Both choices are used in the literature.
운동학
환상적으로 제한된 플라스마 장치에서 단일 입자 운동을 연구하려면 속도와 가속 벡터를 알아야 한다.자연선택 = =+ 을를) 고려할 때, 및 poloidal 좌표계의 단위 벡터)는 과 같이 표현할 수 있다

데카르트 좌표에 따라위치 벡터는 다음과 같이 표현된다.

속도 벡터는 다음으로 주어진다.

가속 벡터는 다음과 같다.
![{\displaystyle {\begin{aligned}\mathbf {\ddot {r}} ={}&\left({\ddot {r}}-r{\dot {\theta }}^{2}-r{\dot {\zeta }}^{2}\cos ^{2}\theta -R_{0}{\dot {\zeta }}^{2}\cos \theta \right)\mathbf {e} _{r}\\[5pt]&{}+\left(2{\dot {r}}{\dot {\theta }}+r{\ddot {\theta }}+r{\dot {\zeta }}^{2}\cos \theta \sin \theta +R_{0}{\dot {\zeta }}^{2}\sin \theta \right)\mathbf {e} _{\theta }\\[5pt]&{}+\left(2{\dot {r}}{\dot {\zeta }}\cos \theta -2r{\dot {\theta }}{\dot {\zeta }}\sin \theta +{\ddot {\zeta }}\left(R_{0}+r\cos \theta \right)\right)\mathbf {e} _{\zeta }\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bf0f5668b394d9329d499658b4bbbd0a903265a8)
참고 항목
참조



