케플러 궤도의 매개변수
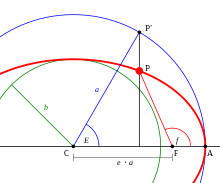
점 P의 진정한 변칙은 각도 f이다.타원의 중심은 C점이고, 초점은 F점이다. 천체역학에서 참 변칙은 케플러 궤도를 따라 움직이는 신체의 위치를 정의하는 각도 매개변수다.타원의 주요 초점(물체가 궤도를 도는 지점)에서 볼 수 있듯이, 그것은 근막의 방향과 신체의 현재 위치 사이의 각도다.
참된 변칙은 보통 그리스 문자 ν이나 θ, 또는 라틴 문자 f로 표시되며, 보통 0~360°(0–2πc)의 범위로 제한된다.
영상에 나타난 바와 같이, 참 이상 징후 f는 궤도를 따라 위치를 정의하는 세 가지 각도 파라미터(이상징후) 중 하나이며, 나머지 두 가지는 편심 이상과 평균 이상이다.
공식
시작 상태 벡터
타원 궤도의 경우, 실제 이상 징후 from은 궤도 상태 벡터에서 다음과 같이 계산할 수 있다.

- (r ⋅ v < 0인 경우, 2을 2 - - ν로 교체)
여기서:
원궤도
원형 궤도의 경우, 원형 궤도는 고유하게 결정된 주탑시(periapsis)를 가지지 않기 때문에 진정한 이상 징후는 정의되지 않는다.대신 위도 u의 인수가 사용된다.

- (rz < 0인 경우 u를 2 2 - u로 교체)
여기서:
- n은 오름차순 노드를 가리키는 벡터(즉, n의 z-성분은 0이다).
- r은z 궤도 위치 벡터 r의 z 성분이다.
기울기가 0인 원형 궤도
기울기가 0인 원형 궤도의 경우, 특이하게 결정된 노드의 라인이 없기 때문에 위도 인수도 정의되지 않는다.대신 진정한 경도를 사용한다.

- (vx > 0이면 l를 2㎛ - l로 교체)
여기서:
편심 이상 현상으로부터
참 변칙 ν과 편심 변칙 E 사이의 관계는 다음과 같다.

또는 사인[1] 및 접선 사용:
![{\displaystyle {\begin{aligned}\sin {\nu }&={{{\sqrt {1-e^{2}\,}}\sin {E}} \over {1-e\cos {E}}}\\[4pt]\tan {\nu }={{\sin {\nu }} \over {\cos {\nu }}}&={{{\sqrt {1-e^{2}\,}}\sin {E}} \over {\cos {E}-e}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e78fa556ab9265fb1281a7a87ae21f9e290615a9)
또는 동등하게:

그렇게

또는 두 접선이 무한대가 되면서 인수가 ±±  에 가까울 때 숫자 문제를 방지하는 방식으로 이 방정식의 형식을 도출했다.또한 }} 및
에 가까울 때 숫자 문제를 방지하는 방식으로 이 방정식의 형식을 도출했다.또한 }} 및 항상 동일한 사분면에 있으므로
항상 동일한 사분면에 있으므로 신호 문제는 없을 것이다.
신호 문제는 없을 것이다.
 where
where 
그렇게

평균 이상 현상으로부터
실제 이상 징후는 푸리에 확장을 통해 평균 이상 징후에서 직접 계산할 수 있다.[3]

여기서 ( ) 는 생략된 항이 모두 e 이상4 순서임을 의미한다 .정확성 때문에 이 근사치는 보통 편심률(e)이 작은 궤도로 제한된다는 점에 유의하십시오.
.정확성 때문에 이 근사치는 보통 편심률(e)이 작은 궤도로 제한된다는 점에 유의하십시오.
- 이라는 표현은 중심 방정식으로 알려져 있다.
있다.
실제 이상 징후로부터의 반지름
반경(인력의 초점과 궤도를 선회하는 본체 사이의 거리)은 공식에 의한 참된 변칙과 관련이 있다.

여기서 a는 궤도의 반주축이다.
참고 항목
참조
- ^ David A에 의한 Astrodynamics 및 Applications의 기초.발라도
- ^ 브루크, R, & Cefola, P. 1973, 천체역학, 7, 388
- ^ Roy, A.E. (2005). Orbital Motion (4 ed.). Bristol, UK; Philadelphia, PA: Institute of Physics (IoP). p. 84. ISBN 0750310154.
추가 읽기
- 머레이, C. D. & Dermott, S. F., 1999, 솔라 시스템 다이내믹스, 캠브리지 대학 출판부, 캠브리지.ISBN 0-521-57597-4
- 플럼머, H. C., 1960년 뉴욕 도버 출판사의 동력 천문학 입문 논문.OCLC 1311887 (1918년 캠브리지 대학 출판부 개정판)
외부 링크