소행성 리디렉션 미션
Asteroid Redirect Mission
소행성탐사선(ARU) 임무와 소행성 이니셔티브로도 알려진 소행성탐사선(ARM)은 2013년 NASA가 제안한 우주선 임무였다. 소행성 탐사 로봇 미션(ARRM) 우주선은 지구 가까이 있는 대형 소행성과 랑데부하고 로봇 팔을 이용해 소행성으로부터 4미터 높이의 돌을 회수한다.
그 우주선과 더욱 더 로봇식 탐사 및 미래 승무원 임무, 소행성 RedirectCrewed 미션(ARCM)[1]만약 자금이 이 임무는 12월에 개국할 것에 의해 분석할 수 있는 안정적인 달의 궤도에 바위를 이송하기 전에 적어도 하나의 행성 방어 기술을 소행성의 특성을 보여 줄 것이다.2021,[2] 첨단 이온 추진기를 포함한 미래 인간 우주 탐사에 필요한 많은 새로운 능력을 시험하기 위한 추가 목표와 함께.[3]
2018년 제안된 NASA 예산안은 취소를 요구했고,[4] 그 임무는 2017년 4월에 해체 통보를 받았고,[5] NASA는 2017년 6월 13일에 "폐쇄"를 발표했다.[5] ARM을 위해 개발되고 있는 핵심 기술들, 특히 로봇 임무로 비행했을 이온 추진 시스템들이 계속되었다.
목표

소행성 리디렉션 미션의 주요 목표는 NASA의 화성 여행에 따라 화성과 다른 태양계 행선지로[6][7] 가는 인간 미션에 대비하기 위해 필요한 심층 우주 탐사 능력을 개발하는 것이었다.[8][9][10][11][12]
화성 전구체
우주 예인 미션은 시간상 중요하지 않은 화성 물류를 승무원으로부터 세분화하기 위한 것으로, 승무원이 출발하기 전에 중요 시스템의 현장 체크아웃을 가능하게 하여 비용을 최대 60%(첨단 태양열 전기 추진체(이온 엔진 사용 시)[13]까지 절감할 수 있으며, 전체적인 비행 위험을 줄일 수 있다.[6][11][8][14][15][16]
태양열 추진(SEP) 기술과 설계가 미래의 임무에 적용될 뿐만 아니라, ARRM 우주선은 재사용을 위해 안정적인 궤도에 남겨질 것이다.[6][8][11] 이 프로젝트는 다중 급유 능력을 기반으로 했다; 소행성 특유의 탑재체는 버스의 한쪽 끝에 있고, 향후 서비스를 통해 제거와 교체가 가능하거나 분리 가능한 우주선으로서, 시슬라의 공간에 적격 공간을 줄이다.[7][9][17][18][19]
확장되고 지속 가능한 심층 공간 운영
로봇과 승무원이 탑승한 임무는 지구 궤도를 지나 수일 내에 복귀할 수 있는 비상 상황을 보여줄 것이다.[20] 지구-문 L1과 L2를 포괄하는 달 원거리 역행 궤도(DRO)는 본질적으로 지구 시스템 탈출과 포획을 위한 노드다.[11][21][22][23] 이는 ARM과 유사한 SEP 모듈로 인간 체류를 연장하기 위해 탐색 증강 모듈(EAM)을 가져온다면 더욱 그러하다.[6][8][11] 화성에서 귀환하는 다리에서는 인간 임무가 DRO에 포획되어 지구 귀환과 재진입을 위해 주차된 오리온으로 이동함으로써 수 톤의 질량을 절약할 수 있다.[12]
추가목표
두 번째 목표는 "그 소행성은 보너스였다"[12]라는 작은 지구 가까이 있는 소행성을 달 궤도에 진입시키는 데 필요한 기술을 개발하는 것이었다. 그곳에서 2026년 오리온 EM-5 또는 EM-6 ARCM 임무의 승무원이 분석할 수 있었다.[2][24][25]
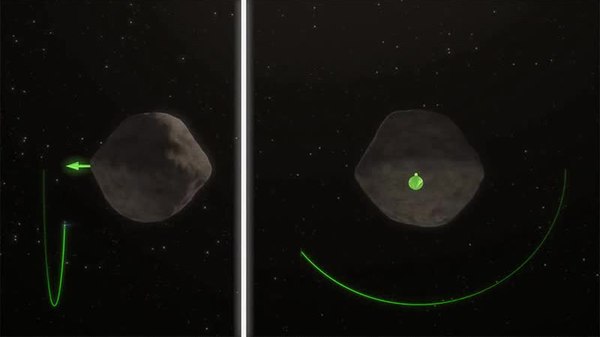
추가적인 미션 목표로는 잠재적으로 위험한 소행성을 피하기 위해 로봇 우주선을 사용하는 것과 같은 미래에 지구를 보호할 수 있는 행성 방어 기술을 시연하는 것을 포함했다.[24][26] 소행성을 비껴가는 것을 고려하는 것은 소행성을 잡고 소행성을 직접 이동시키는 것뿐만 아니라, 소행성의 표면에서 돌을 모아 질량을 증가시킨 후에 중력 트랙터 기법을 이용하는 것이다.중력 트랙터")[27]을 채택하는 것이다.
이 임무는 또한 우주에서 발전된 태양 전기 추진력(이온 엔진)[13]과 광대역 레이저 통신의 성능을 시험할 것이다.[28] 이러한 새로운 기술은 화성과[31]/또는 포보스로의 인간 임무에 앞서 대량의 화물, 서식지, 추진체를 화성으로 보내는 데 도움이 될 것이다.[43]
| NASA 소행성 리디렉션 임무 |
|---|
| |
우주선 개요


그 차량은 큰 소행성에 착륙할 것이고 로봇 팔의 끝에 있는 그리퍼는 큰 소행성의 표면으로부터 바위를 잡고 고정시킬 것이다. 그립퍼는 바위를 파고들어 강한 그립을 만들곤 했다. 포획 메커니즘에 바위를 최종 고정하는 데 통합 드릴을 사용할 수 있다.[46] 일단 바위가 고정되면, 다리는 밀어내고 추력기를 사용하지 않고 초기 상승을 제공할 것이다.[24][27]
추진
우주선은 첨단 태양 전기 추진력(SEP)에 의해 추진될 것이다. 전기는 고효율 UltraFlex 스타일의 태양 전지판(50kW)에 의해 제공될 것이다.[13][47]
첨단 이온 엔진은 등가 화학물질로켓에 필요한 추진체의 10%를 사용하며 기존 설계의 3배에 달하는 출력을 가공할 수 있으며 효율을 [48]50%까지 높일 수 있다. 그것은 낮은 가속도를 제공하지만 큰 질량을 고속으로 밀어내기 위해 수년 동안 연속적으로 발사할 수 있는 홀 효과를 사용할 것이다.[13] 홀 효과 추진기는 자기장에 전자를 가두어 탑재된 제논 가스 추진체를 이온화하는 데 사용한다. 또한 자기장은 충전된 이온을 가속시키는 전기장을 생성하여 우주선을 앞으로 밀어내는 플라즈마의 배기가스 플룸을 생성한다.[48] 이 우주선의 개념은 5.5톤의 건조한 질량을 가질 것이고, 최대 13톤의 제논 추진체를 저장할 수 있을 것이다.[49]
각 추진체는 30에서 50 킬로와트의 전력 수준을 가질 수 있으며,[50] 여러 개의 추진장치를 결합하여 SEP 우주선의 힘을 증가시킬 수 있다. 300킬로와트 이상으로 확장 가능한 이 엔진은 노스럽 그루먼이 샌디아 국립연구소와 미시간 대학교와 함께 연구 개발 중이다.[51] NASA 글렌 연구 센터가 이 프로젝트를 관리하고 있다.[51]
목적지에서도 SEP 시스템은 선원이 도착하기 전에 시스템을 유지하거나 추진체 보급을 방지할 수 있도록 구성할 수 있다.[6][52] 그러나 기존의 비행 자격 태양전기 추진은 1-5 kW 수준이며, 화성 화물 임무에는 100 kW, 승무원 비행은 150–300 kW가 필요하다.[6][11]
제안된 타임라인
원래 2017년, 2020년,[26][46] 2021년 12월로 계획되었다.[2] 이 임무는 2017년 4월에 해체 통보를 받았다.[5] 발사 차량은 델타 IV 헤비, SLS 또는 팔콘 헤비 중 하나였을 것이다.[53] 그 바위는 2025년 말에 달 궤도에 도달했을 것이다.[46]
표적 소행성
2017년[update] 10월 29일 현재, 16,950개의 근접 지구 소행성이 여러 수색팀에 [54]의해 발견되어 잠재적으로 위험한 물체로 분류되고 있다. 2017년 초까지 NASA는 아직 ARM의 표적을 선정하지 못했지만, 계획과 시뮬레이션을 위해 지구 가까이 있는 소행성(341843) 2008 EV5를 우주선이 4m(13ft)의 바위를 한 개씩 줍는 예시로 사용하였다.[24] 다른 후보 부모 소행성들은 이토카와, 베누, 류구였다.[53]
임무에 의해 잡혔을 카본바위(최대 직경 6m, 20t)[45]는 너무 작아서 대기 중에 타버리기 때문에 지구를 해칠 수 없다. 소행성 질량을 달 주위를 도는 먼 역행 궤도로 방향을 바꾸면 소행성이 지구와 충돌하지 않고 향후 연구를 위해 안정적인 궤도에 남겨둘 수 있을 것이다.[29]
역사
NASA의 로버트 프로슈 행정관은 1980년 7월 의회에 '지구로의 아스테로이드 검색'에 대해 증언했다. 그러나 그는 당시 그것이 실현 불가능했다고 말했다.[55][56]
ARU 임무는, 그것이 가능하게 할지도 모르는 소행성에 대한 인간의 임무를 제외한, Keck 우주 연구소의 2012년 타당성 조사의 대상이었다.[49] 미션 비용은 글렌연구센터가 약 26억 달러로 추산했으며,[57] 이 중 1억500만 달러가 2014년 이 개념을 성숙시키기 위해 지원됐다.[28][58] NASA 관계자들은 ARM이 화성에 대한 인간 임무를 위한 장기 계획의 한 단계로서 의도된 것이라고 강조했다.[46]

작은 소행성을 회수하기 위해 연구된 두 가지 옵션은 옵션 A와 옵션 B였다. 옵션 A는 지름 8m(26ft)[13]의 작은 소행성을 잡을 수 있는 대형 15m(50ft) 포획 백과 최대 500t의 중량을 배치할 것이다.[28] 2015년 3월 선정된 옵션 B는 차량이 대형 소행성에 착륙하도록 하고 로봇 팔을 배치해 표면에서 지름 4m(13ft)의 바위를 들어 올려 운반해 달 궤도에 올려놓는다.[24][29] 이 옵션은 미래의 랑데부, 자율 도킹, 착륙선, 샘플러, 행성 방위, 채굴 및 우주선 서비스 기술과 더 관련이 있는 것으로 확인되었다.[59][60]
달 궤도(오리온 EM-3)에서 소행성 표본을 회수하기 위해 승무원이 투입된 부분은 수천 개의 운석이[61] 이미 분석됐으며, 한 개의 바위를 회수하는 기술이 화성 탐사 임무를 개발하는 데 도움이 되지 않는다는 주장과 함께 불필요한 임무라는 비판을 받았다.[46] NASA 자문위원회가 2015년 4월 10일, NASA가 ARM 계획을 이행하지 말고 대신 태양열 전기 추진력을 개발해 화성 왕복 비행에 우주선에 동력을 공급하는 데 이용해야 한다고 제안했음에도 계획은 바뀌지 않았다.[62]
2016년 1월, NASA의 제트 추진 연구소(JPL)가 태양 전기 추진 기반 우주선의 설계 연구를 위한 계약을 수주했다. 로봇 ARM 임무는 ARM의 첫 단계였을 것이다. 계약은 콜로라도주 리틀턴의 록히드 마틴 스페이스 시스템즈, 캘리포니아주 헌팅턴 비치의 보잉 팬텀웍스, 버지니아주 덜레스, 그리고 캘리포니아주 팔로 알토의 오비탈 ATK/로럴이 수주했다.[63]
2016년 5월 ASI(이탈리아 우주국)가 공동 연구, 이탈리아 참여 가능성에 합의했다.[64]
트럼프 행정부가 2017년 3월 제시한 2018년 NASA 예산안에 따라 이 임무는 취소됐다.[4] 2017년 6월 13일, NASA는 디펜던트에 이어 "폐쇄 단계"를 발표했다.[5] NASA는 ARM을 위해 개발되고 있는 핵심 기술들, 특히 로봇 임무로 비행되었을 태양 전기 추진 시스템이 계속 될 것이라고 강조해 왔는데, 이것은 달 게이트웨이에 전력과 추진 요소로 사용될 것이다.[5][65]
참고 항목
참조
- ^ Wall, Mike (April 10, 2013). "Inside NASA's Plan to Catch an Asteroid (Bruce Willis Not Required)". Space.com. TechMediaNetwork. Retrieved April 10, 2013.
- ^ a b c Foust, Jeff (March 3, 2016). "NASA slips schedule of Asteroid Redirect Mission". SpaceNews. Retrieved March 6, 2016.
- ^ Agle, DC (April 10, 2013). "NASA Associate Administrator on Asteroid Initiative" (Press release). Washington, DC: JPL. Retrieved March 29, 2015.
- ^ a b Harwood, William (March 16, 2017). "Trump budget blueprint focuses on deep space exploration, commercial partnerships". Spaceflight Now. Retrieved March 17, 2017.
- ^ a b c d e Jeff Foust (June 14, 2017). "NASA closing out Asteroid Redirect Mission". Space News. Retrieved September 9, 2017.
- ^ a b c d e f Cassady, J.; Maliga, K.; Overton, S.; Martin, T.; Sanders, S.; Joyner, C.; Kokam, T.; Tantardini, M. (2015). "Next Steps in the Evolvable Path to Mars". Proceedings of the IAC.
- ^ a b Manzanek, D. (May 20, 2016). The Asteroid Redirect Mission. USNO Scientific Colloquium.
- ^ a b c d Troutman, P. (July 30, 2014). The Evolvable Mars Campaign: the Moons of Mars as a Destination.
- ^ a b Gates, M.; Manzanek, D. (June 28, 2016). Asteroid Redirect Mission (ARM). 15th Meeting of the NASA Small Bodies Assessment Group.
- ^ Brophy, J.; Friedman, L.; Strange, N.; Prince, T.; Landau, D.; Jones, T.; Schweickart, R.; Lewicki, C.; Elvis, M.; Manzella, D. (October 2, 2014). Synergies of Robotic Asteroid Redirection Technologies and Human Space Exploration. 65th International Astronautical Congress (IAC-2014), 29 September – 3 October 2014, Toronto, Canada. International Astronautical Federation. pp. Art. No. IAC–14.A5.3.
- ^ a b c d e f Craig, D. Evolvable Mars Campaign. Jun 10 2015.
- ^ a b c Elvis, M. (August 11, 2014). "ARM and the Mars Forward NASA".
- ^ a b c d e Tate, Karl (April 10, 2013). "How to Catch an Asteroid: NASA Mission Explained (Infographic)". Space.com. TechMediaNetwork. Retrieved March 26, 2015.
- ^ Howell, E. (May 8, 2015). "Human Mars Plan: Phobos by 2033, Martian Surface by 2039?". space.com. Retrieved October 9, 2016.
- ^ McElratht, T.; Elliott, J. (January 2014). "There and Back again: Using planet-based SEP tugs to repeatably aid interplanetary payloads". Advances in the Astronautical Sciences (152): 2279–2298.
- ^ Price, Humphrey W.; Woolley, Ryan; Strange, Nathan J.; Baker, John D. (2014). "Human Missions to Mars Orbit, Phobos, and Mars Surface Using 100-kWe-Class Solar Electric Propulsion". AIAA SPACE 2014 Conference and Exposition. doi:10.2514/6.2014-4436. ISBN 978-1-62410-257-8.
- ^ Manzanek, D.; Reeves, D.; Hopkins, J.; Wade, D.; Tantardini M.; Shen, H. (April 13, 2015). "Enhanced Gravity Tractor Technique for Planetary Defense". IAA-PDC.
- ^ NASA RFI: Spacecraft Bus Concepts to Support the ARM and In-Space Robotic Servicing- Section "Separable Spacecraft Architecture ARRM Concept".
- ^ Will April, 2020 be the last month on this earth? NASA told the whole truth. Retrieved March 20, 2020.
- ^ Moore, C. (January 2014). "Technology development for NASA's asteroid redirect mission" (PDF). IAC-14-D2.8-A5.4.1.
{{cite journal}}: Cite 저널은 필요로 한다.journal=(도움말) - ^ Conte, D. DiCarlo, M. Ho, K. Spencer, D. Vasile, M. (August 28, 2015). "Earth-Mars Transfer through Moon Distant Retrograde Orbits" (PDF). Acta Astronautica (Submitted manuscript). 143: 372–379. Bibcode:2018AcAau.143..372C. doi:10.1016/j.actaastro.2017.12.007.
- ^ Gong, S.; Li, J. (September 1, 2015). "Asteroid Capture Using Lunar Flyby". Advances in Space Research. 56 (5): 848–858. Bibcode:2015AdSpR..56..848G. doi:10.1016/j.asr.2015.05.020.
- ^ Englander, J.; Vavrina, M. Naasz, B. Merill, R. Qu, M. "Mars, Phobos, and Deimos Sample Return Enabled by ARRM Alternative Trade Study Spacecraft". AIAA 2014.
- ^ a b c d e Foust, Jeff (March 25, 2015). "NASA Selects Boulder Option for Asteroid Redirect Mission". SpaceNews. Retrieved March 27, 2015.
- ^ a b NASA의 소행성 방향 전환 임무는 어떻게 인류가 화성에 도달하도록 도울 것인가? NASA, 2014년 6월 27일.
- ^ a b c "NASA Announces Next Steps on Journey to Mars: Progress on Asteroid Initiative". NASA. March 25, 2015. Retrieved March 25, 2015.
- ^ a b NASA 유튜브 동영상:ARM, '옵션 B': 큰 소행성으로부터 바위를 채취한다.
- ^ a b c Malik, Tariq (March 27, 2015). "Obama Seeks $17.7 Billion for NASA to Lasso Asteroid, Explore Space". Space.com. TechMediaNetwork. Retrieved April 10, 2013.
- ^ a b c Erin Mahoney. "What Is NASA's Asteroid Redirect Mission?". NASA.GOV. NASA. Retrieved July 6, 2014.
- ^ 캐슬린 C. 로리니와 미셸 게이츠, 2014년 9월~10월 캐나다 토론토에서 열린 제65차 국제우주대회 "NASA의 우주탐사계획: 소행성 미션과 화성으로 가는 계단 지혜로운 길" 본 논문(및 65 IAC의 관련 논문)은 NASA 페이지 소행성 이니셔티브 관련 문서(2014년 1월 5일 액세스)에서 확인할 수 있다.
- ^ [25][26][29][30]
- ^ Bamsey, M. "Investigation of a Phobos Sample Return Mission". Archived from the original on October 5, 2016. Retrieved September 14, 2016.
- ^ Hoffman, S. "A Phobos-Deimos Mission as an Element of the NASA Mars Design Reference Architecture 5.0". Second International Conference on the Exploration of Phobos and Deimos 2011.
- ^ Strange, N.; Merrill, R.; et al. "Human Missions to Phobos and Deimos Using Combined Chemical and Solar Electric Propulsion". 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit.
- ^ "Human Mars Plan: Phobos by 2033, Martian Surface by 2039?". May 8, 2015. Retrieved September 14, 2016.
- ^ Duggan, Matthew (December 2015). "The Path to Mars" (PDF). Archived from the original (PDF) on November 8, 2019. Retrieved September 14, 2016.
- ^ "Mars Base Camp". Retrieved September 14, 2016.
- ^ "Emerging Capabilities for the Next Mars Orbiter" (PDF). Archived from the original (PDF) on October 5, 2016. Retrieved September 14, 2016.
- ^ "The New Orbit-first Consensus". Retrieved September 14, 2016.
- ^ Lee, P.; Hoftun, C.; et al. (2012). "Phobos and Deimos: Robotic Exploration in Advance of Humans to Mars Orbit". Concepts and Approaches for Mars Exploration 2012. 1679: 4363. Bibcode:2012LPICo1679.4363L.
- ^ Price, H.; Baker, J.; et al. "Human Missions to Mars Orbit, Phobos, and Mars Surface Using 100-kWe-Class Solar Electric Propulsion". AIAA Space 2014 Conference and Expo Proceedings.
- ^ Percy, T.; McGuire, M.; et al. "Combining Solar Electric Propulsion and Chemical Propulsion for Crewed Missions to Mars". NTRS 20150006952.
- ^ [32][33][34][35][36][37][38][39][40][41][42]
- ^ John Brophy; Fred Culick; Louis Friedman; et al. (April 12, 2012). "Asteroid Retrieval Feasibility Study" (PDF). Keck Institute for Space Studies, California Institute of Technology, Jet Propulsion Laboratory.
Table 1: Asteroid Mass Scaling (for spherical asteroids). Page 17.
- ^ a b "NASA Calls for American Industry Ideas on ARM Spacecraft Development". SpaceRef. October 22, 2015. Retrieved October 23, 2015.
- ^ a b c d e Foust, Jeff (March 27, 2015). "NASA's Choice for Asteroid Redirect Mission May Not Sway Skeptics". SpaceNews. Washington DC. Retrieved March 28, 2015.
- ^ 고급 태양열 어레이: 탐색 전원 공급. 나사
- ^ a b "Hall Thruster Research: Propelling Deep Space Missions". SpaceRef. March 31, 2015. Retrieved March 31, 2015.
- ^ a b Brophy, John; Culick, Fred; Friedman and al, Louis (April 12, 2012). "Asteroid Retrieval Feasibility Study" (PDF). Keck Institute for Space Studies, California Institute of Technology, Jet Propulsion Laboratory.
- ^ 태양전기추진장치(SEP) 나사
- ^ a b Blake, Mary (January 31, 2012). "Northrop Grumman Tapped by NASA to Develop Solar Electric Propulsion Flight Concepts for Future Space Missions". Northrop Grumman Corporation. Retrieved March 31, 2015.
- ^ "Why ARM?". January 21, 2015. Retrieved October 9, 2016.
- ^ a b Gates, Michele (July 28, 2015). "Asteroid Redirect Mission Update" (PDF). NASA. Retrieved September 6, 2015.
- ^ "Near-Earth Asteroid Discovery Statistics". NASA/JPL CNEOS. October 25, 2017. Retrieved October 29, 2017.
- ^ "H. Rept. 114–153 - SPACE RESOURCE EXPLORATION AND UTILIZATION ACT OF 2015". Retrieved October 2, 2016.
- ^ "Human Asteroid Exploration: The Long And Storied Path". April 17, 2013. Retrieved September 14, 2016.
- ^ NASA 태양계 탐사, 소행성 리디렉션 미션 (ARM) 2015년 4월 27일 웨이백 머신에 보관 (2014년 9월 30일 액세스)
- ^ NASA 2014년 ARU 임무 예산안(PDF)
- ^ Steitz, D. "NASA seeks additional information for asteroid redirect mission spacecraft". phys.org. Retrieved October 10, 2015.
- ^ Ticker, R. (August 2015). "NASA's In-Space Robotic Servicing". Proceedings, AIAA SPACE 2015 Conference and Exposition: 4644.
- ^ Grush, Loren (August 7, 2014). "Everyone Hates NASA's Asteroid Capture Program". Popular Science. Retrieved March 27, 2015.
- ^ Staff (April 13, 2015). "News from the 31st Space Symposium: Bolden Not Concerned About ARM Criticism". SpaceNews. Retrieved April 15, 2015.
- ^ "Companies Selected to Provide Early Design Work for Asteroid Redirect Robotic Mission Spacecraft". NASA. January 27, 2016. Retrieved January 30, 2016.
- ^ "Asteroid Redirect Mission: robotic collaboration between NASA and ASI". Retrieved September 14, 2016.
- ^ "NASA closing out Asteroid Redirect Mission". SpaceNews.com. June 14, 2017. Retrieved May 30, 2019.
외부 링크
| 위키미디어 커먼즈에는 소행성 리디렉션 미션과 관련된 미디어가 있다. |
- NASA의 소행성 이니셔티브 프로그램
- 유튜브 동영상
- 비디오: 소행성 리디렉션 미션, '옵션 A', 8m 자유 비행 소행성 포착
- 비디오: 소행성 리디렉션 미션, '옵션 B', 큰 소행성으로부터 볼더 채집.
- 비디오: 소행성 리디렉션 미션: 달 궤도에서 ARM과 만나는 오리온 우주선
- 비디오: 소행성 리디렉션 미션: 로보틱 세그먼트 NASA
| 정책 및 역사 |
| ||||||
|---|---|---|---|---|---|---|---|
| 인간 우주 비행 프로그램 |
| ||||||
| 로보틱 프로그램 |
| ||||||
| 개별 피처링 임무들 (인간 및 로봇) |
| ||||||
| 커뮤니케이션 및 항법 | |||||||
| NASA 목록 | |||||||
| NASA 이미지 그리고 예술품 | |||||||
| 관련 | |||||||
| 활동적인 |     | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 과거 |
| ||||||||||
| 계획된 | |||||||||||
| 프로포즈 | |||||||||||
| 취소됨 또는 미개발의 | |||||||||||
| 관련 | |||||||||||
| |||||||||||


{kind=link}